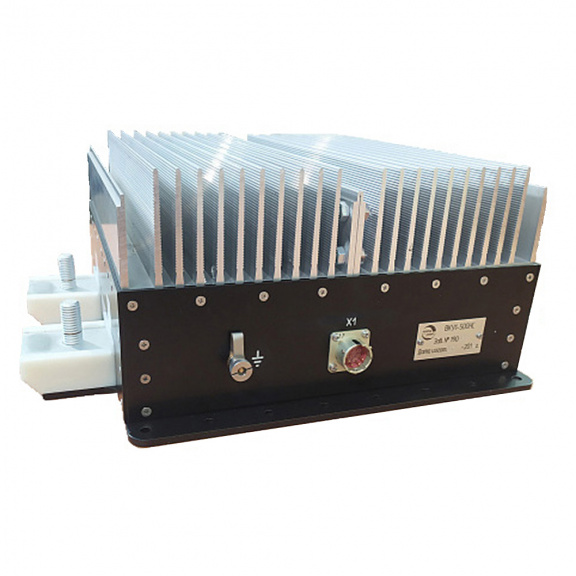
Бесплатформенная инерциальная навигационная система БИНС-500НС – малогабаритная инерциальная навигационная система, построенная на базе трех волоконно-оптических гироскопов (ВОГ), трех акселерометров и спутникового приемника. Предназначена для широкого класса подвижных объектов различного назначения.
Основные функции инерциальной навигационной системы:
- счисление и коррекция углов ориентации;
- счисление и коррекция координат;
- счисление и коррекция скоростных параметров;
- информационный обмен с потребителями по стандартным интерфейсам.
Основные модули системы БИНС-500НС:
- блок чувствительных элементов (БЧЭ);
- процессорная плата;
- приемник спутниковой навигационной системы (СНС);
- антенный блок;
- модуль (плата) питания.
Технология построения аппаратного и программно-математического обеспечения системы
Бесплатформенная инерциальная навигационная система БИНС-500НС разработана на основе модульной технологии построения аппаратного и программно-математического обеспечения.
Отличительные особенности модульной технологии:
- унификация и стандартизация процессорных и программно-математических модулей;
- адаптация интерфейсных модулей под объект;
- буферизация потоков данных и распараллеливание вычислений;
- синхронизация процедур обработки данных в модулях; многоуровневая RISC-организация вычислительного процесса;
- обмен данными между модулями по системной шине;
- повышение однородности вычислительного процесса на основе минимизации количества проверок и условий;
- согласование процедур первичной и вторичной обработки сигналов с возможностями вычислительного ядра;
- открытая архитектура, позволяющая расширять вычислительные ресурсы и модернизировать БИНС под объект.







![123[1].jpg](/upload/medialibrary/c0c/768her0pizbjuecgd03jz69f8l4qwwrm.jpg "123[1].jpg")
![1234[1].JPG](/upload/medialibrary/742/zsz7zq9s99hsprsinxqs6valgkb1827u.JPG "1234[1].JPG")
![bins-05_1000[1].png](/upload/medialibrary/b01/9s83y1obwoc4nrgk7yupp4e5twu90oi9.png "bins-05_1000[1].png")
![bins-06_1000[1].png](/upload/medialibrary/08e/x744cy7cazcuns509e41ec47vjo22z8a.png "bins-06_1000[1].png")